|
|
|
|
Original Article
Hand gesture recognition for EMG signal based on different machine learning methods
|
Batool Abd
Alhade 1* 1 College of Science,
Al-Qasim Green University, Babylon, Iraq |
|
|
|
ABSTRACT |
||
|
Muscle electrical activity is measured by electromyography (EMG) signals, which are typically expressed as frequency, amplitude, and phase as function of time. Applications for biosignals include the diagnosis of neuromuscular disorders, the control of assistive devices, like orthotic or prosthetic devices, the control of machinery, computers, robots, etc. For the purpose of improving hand gesture recognition, the presented study employed EMG signals, band pass filtering, and finite impulse response for removing artifacts as well as low-frequency noise (like baseline drift or body movement) and high-frequency noise (like electrical interference) impairing the performance of the system. In order to more precisely identify hand gestures, efficient methods have been employed for classifying gestures utilizing a variety of machine learning (ML) classifiers (SVM, Random Forest (RF), KNN, and Gradient Boosting). The classification accuracy using Random Forest (99.9%) reached, accuracy using SVM (97.4%), accuracy using KNN (99.1%). while the classification accuracy using Gradient Boosting (99.7%) Keywords: RF, SVM, KNN, GBM, FIR |
||
INTRODUCTION
Applications for EMG signals include the diagnosis
regarding developing muscle-oriented exercise equipment,
neuromuscular disorders, orthotic and prosthetic device control,
human-machine interfaces, VR games, and more Kumari
and Ali (2015). Recently,
myoelectric control was utilized extensively, with hand-posture
recognition depending upon EMG technology being the most common. The more
complex and larger motions of wrist, hand, and
arm—like forearm supination, forearm pronation, wrist flexion, wrist
extension, wrist ulnar deviation, wrist radial deviation, and wrist
external and internal rotation—have been the subject of the majority of earlier
research Shi et al. (2018). The demand for
more accurate and natural human–computer interaction systems has led
to significant advancements in hand gesture detection systems during the past
20 years. Additionally, upper limb prosthesis is one where Human Computer
Interfaces (HCI) are increasingly significant. Since the hands are among the
most vital and useful parts of bodies, losing them could significantly
lower a person's quality of life. This is the primary cause of the abundance of
research in literature looking for the best methods to operate upper limb
active prostheses. Despite the volume of publications, there are still a
few significant obstacles when it comes to actual HCI methods for
controlling upper limb prostheses Toro-Ossaba et al. (2022).
A two-channel sEMG-based system was
created in Shi et al. (2018) for controlling
a bionic hand as well as identifying human hand postures. Four
time-domain features, which are (ZC, MAV, SSC, and WL) have
been derived from sEMG signals obtained from flexor digit rum superficial
as well as extensor digit rum muscles. Using K-nearest neighbors (KNN)
classifier, a total of four distinct hand postures were recognized.
Custom-built bionic hand's servo motors have been driven by Arduino
controller that received classification outputs. The bionic hand effectively
replicated the desired hand postures, and the experimental results demonstrated
high online accuracy of 94%.
In Zhang et
al. (2011),
the researchers
presented a model for hand-gesture recognition, combining information from
multichannel EMG sensors as well as three-axis accelerometer. EMG
intensity is used for automatically identifying gesture segments, and
multistream hidden Markov models and a decision tree (DT) are used for
obtaining the final classification. Experiments on 40 continuous sentences
as well as 72 Chinese Sign Language words demonstrate the technique's
efficacy as well as the complementary strengths regarding EMG and ACC signals.
For showing gesture-based control, an 18-gesture virtual Rubik's cube game
is created in real time. Tests that are both user-independent and
user-specific verify that the framework facilitates natural and
intelligent HCI.
In Qi et al. (2020), with the use
of principle component analysis (PCA) as well as GRNN neural network,
researchers created gesture recognition system that improves detection
accuracy and efficiency by reducing dimensionality and redundancy in EMG
signals. Four signal characteristics have been taken from arm sEMG data
and applied to a total of 9 static gestures as samples. Following neural
network training as well as dimension reduction, the system's overall
recognition rate was 95.1%, with average recognition time of 0.19 seconds.
In López et
al. (2024),
Through comparing CNN-LSTM and CNN models and using post-processing
technique for filtering out spurious predictions, the researchers
were able to enhance hand gesture recognition (HGR) from EMG signals. With
EMG-EPN612 dataset, which included 5 gestures from 612 people, post-processing
improved CNN-LSTM and CNN accuracy by 24.77% and 41.86%, respectively.
Accuracy increased by 3.29% with the addition of memory cells (CNN-LSTM),
yet 53 times more parameters were needed. CNN-LSTM with post-processing
produced a 90.55% mean recognition accuracy. The findings demonstrate the
advantages regarding memory as well as post-processing in HGR and
offer avenues for further investigation.
In Aarotale
and Rattani (2024), the authors
combined ML and DL models with fused time-domain, temporal-spatial, and
wavelet-based features to establish benchmarks for novel feature extraction
techniques. With the use of fused time-domain descriptors, 1D Dilated CNN
obtained 97% accuracy on Grabmyo dataset. RF used temporal-spatial
descriptors for obtaining 94.95% accuracy on FORS-EMG dataset.
The remaining parts of the study are arranged as follows: In the
following section, we discuss the key topic of the presented study. In
part (3), the suggested model is discussed. Experimental results are shown in
Part (4). Lastly, part (5) contains the paper's conclusión
Materials and Methods
Signal Acquisition
MYO Thalmic bracelet, as depicted in Figure 1., was worn on
volunteer's forearm for recording patterns, and a computer that has a
Bluetooth receiver. The bracelet's eight sensors, which are evenly spaced
throughout the forearm, were designed to simultaneously record electromyography
signals. The computer received the signals via Bluetooth
|
Figure 1 |
|
|
|
Figure 1 Location of MYO Armband on the Forearm Chung and Benalcázar (2019) |
Raw data
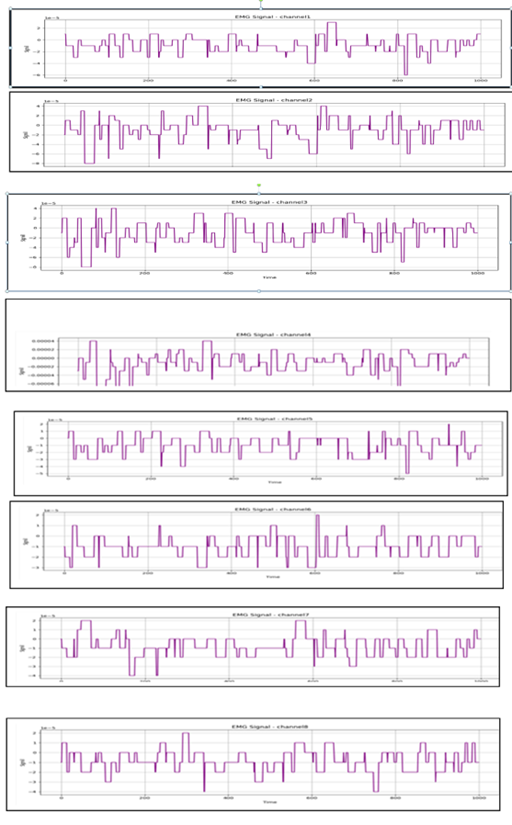
We recorded EMG signals from 36 distinct users using MYO Thalmic. They made
a number of static hand gestures. Every individual made two sets of six or
seven gestures, each lasting three seconds and interspersed with three-second
pause. There are ten columns in each file. Whereas the first column shows
time in ms, columns 2-9 show MYO Thalmic bracelet's EMG channels, and column
ten shows the row with gesture label, which is in the following
sequence: (1) The unmarked data, (2) hand at rest, (3) hand clenched
in a fist, (4) wrist flexion, (5), wrist extension, (6) the radial
deviations, (7) the ulnar deviations, and (8) the expanded
palm. Additionally, the individual who carried out the experiment is
listed in column (11) "Label." Each of the 36 participants did seven
gestures twice. In other words, there are eleven columns in the file. This
is a readme file from the data-set itself. https://archive.ics.uci.edu/ml/datasets/EMG+data+for+gestures
|
Figure 2 |
|
|
|
Figure 2 EMG Signal |
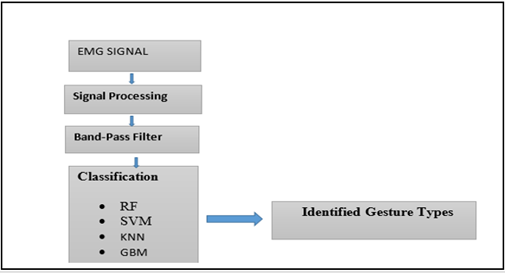
PROPOSED SYSTEM
The suggested system consists of 2 stages: the first is signal processing
using a finite impulse response (Band-Pass Filter) technique to focus only on
important and relevant data and exclude unimportant data. The second is the use
of different classifiers (RF, SVM, KNN, GBM) and comparison of performance
accuracy to classify smart electrical signal patterns and identify gesture
types. All steps were implemented using Python. Figure 3 shows the suggested
syste
|
Figure 3 |
|
|
|
Figure 3 The Proposed
System |
Signal processing
The extracted EMG features (represented by Filtered) underwent
preprocessing using standardization prior to classifier training. In
particular, each feature has been scaled to have zero mean as well
as unit variance using the Standard Scaler. For algorithms like
SVM and KNN, which are sensitive to feature magnitudes, this
step guarantees that each feature contributes equally to the process
of classification.
1)
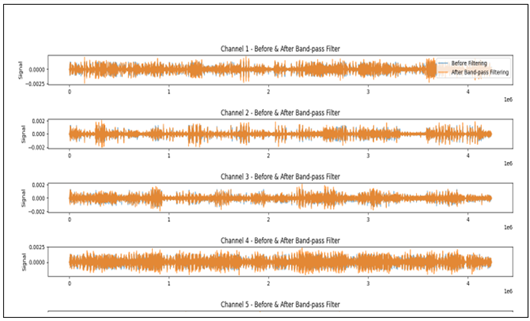
Band‑pass filter
A band-pass filter was applied to retain frequencies in the range of
[typically 20–450 Hz], which correspond to the main EMG signal components,
while removing low-frequency motion artifacts and high-frequency noise.
|
Figure 4 |
|
|
|
Figure 4 Before and After Band-Pass Filter |
signal classification
Four commonly used classifiers for biosignal analysis were employed:
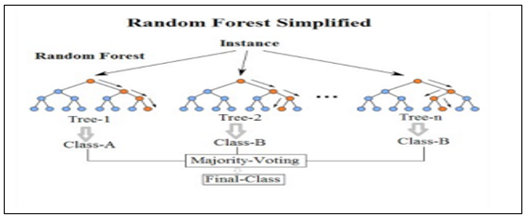
Random Forest (RF)
Since it has first been introduced by L. Breiman in 2001, RF showed to be a
quite effective general-purpose classification as well as regression
method Biau and Scornet (2016). It attracts
scholars from variety of backgrounds because of its inherent
interdisciplinary nature Akar and Güngör (2012). An
ensemble of DTs that efficiently manages feature interactions and noise.
Each one of the tree classifiers in RF classifier casts a unit
vote for most popular class for classifying an input vector, and every one
of the classifiers is created with the use of random vector selected
separately from input vector Al Sayaydeha and Mohammad (2019). The value
utilized commonly as square root of total number of variables is considered
rather robust to the process of number selection in RF. Also,
RF trees are constructed without pruning. According to the value of the
threshold that the user had selected or by majority of votes from
classification trees in forest, the identification of predictions for test
samples will be carried out. It has shown sufficient performance when utilized
for tasks of pattern recognition Ali et al. (2022)
|
Figure 5 |
|
|
|
Figure 5 Typical Random Forest Classification Abdulla et al. (2023) |
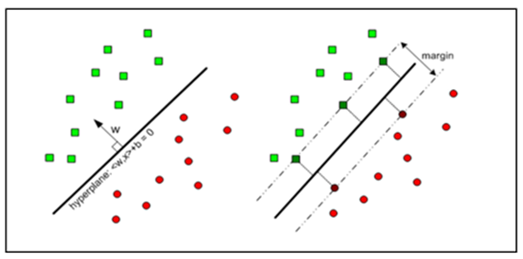
Support Vector Machine (SVM)
At AT & T Bell Laboratories, Vladimir Vapnik and his colleagues
invented SVM. It is recognized as one of the most common algorithms in
supervised ML and is distinguished from other well-known
DM techniques by its reliability, strength, and high accuracy. Put
simply, each example in given set of training samples is assigned into one
of 2 groups. Obeas et
al. (2024). SVMs are
classified with the use of hyperplane or set of hyperplanes that,
with the help of support vectors, separate data points. The idea
regarding a maximum margin hyperplane is illustrated in Figure 6, which divides
positive examples (green squares) from the negative examples (red
circles); the red circles as well as darker green squares stand in for
related support vectors. The hyperplane with the largest functional margin
achieves a total separation from the nearest training data point for any class.
|
Figure 6 |
|
|
|
Figure 6 Maximum
Margin |
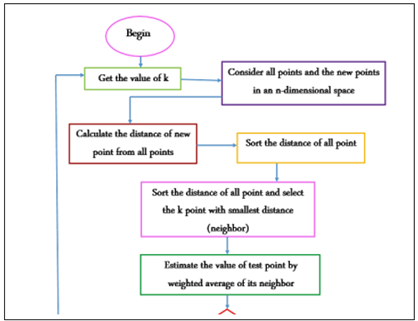
2) K-Nearest Neighbors (KNN)
K-means clustering, usually referred to as "Forgy's algorithm,"
is the most popular as well as majorly utilized data-segmented clustering
technique. Its primary goal is processing a large amount of
high-dimensional data for identifying representative data. Cluster centers are
another name for such representative data. Large volumes of data
could be compressed and classified using such cluster centers. In the
case when employing K-means clustering, the number of clusters must be
established, and following repeated itinerary computing, the errors in each
cluster must be steadily reduced until they don’t change and converge to final
results of clustering. Figure 7. demonstrates
how K-means algorithm works. Prior to calculating every data point's
distance from cluster center as well as allocating it to the closest
cluster center, it calculates cluster number K and establishes cluster center
based on K’s value. Following distribution, a new center of the cluster is
calculated for distribution to the point where the clustering process is
finished and distance from the new cluster center and the data meets the end
condition.
|
Figure 7 |
|
|
|
Figure 7 Flowchart of KNN Algorith Ahmed
et al. (2022). |
3)
Gradient Boosting (GB)
An advanced ensemble algorithm which increases accuracy by
building weak learners sequentially. A family of potent ML approaches that
are referred to as gradient boosting machines has shown notable performance in
various practical scenarios Natekin
and Knoll (2013). GBMs are
the names given to gradient-descent based formulation of boosting techniques as
well as the associated models. GBMs build base learners iteratively
through reweighting misclassified observations, just as AdaBoost. In
contrast to AdaBoost, GBMs use negative partial derivatives regarding loss
function at every one of the training observations to calculate
weights. The partial derivatives are referred to as pseudo-residuals, and
they’re utilized for the iterative expansion of an ensemble. Which is
why, feature space is divided into groups based on related pseudo-residuals.
Scalable variants of GBMs are required for much bigger datasets, even though
they could be effective for fairly small datasets. To meet
such need, tree-based scalable GBMs called LightGBM, XGBoost, and
CatBoost were created lately. We refer to the scalable variants of GBMs as
gradient boosted decision classifiers (GBDCs) in order to differentiate them
from original GBMs that use DTs as base learners. LightGBM,
XGBoost, and CatBoost are scalable GBDT systems that we compare
performance metrics with using GBDCs as a baseline in the presented study Dev and
Eden (2019).
TRAINING AND EVALUATIONS
Every one of the models has been trained on the training set then evaluated
on testing set.
Performance metrics included0 Vujović (2021), Najjar
et al. (2025):
·
Accuracy
Accuracy calculation involves the division of total number of
data-sets (P + N) by summation of two accurate predictions (TP + TN).
1.0 represents maximum accuracy and 0.00 is minimum.
![]()
![]()
·
Precision
Precision is calculated by dividing total number of positive prediction
cases (TP + FP) by number of true positive prediction cases (TP). 1.0 is the
optimal level of accuracy while 0.0 represents the worst.
![]()
![]()
·
Recall
Recall measures the
classifier’s ability to find all positive instances. It is also known as
sensitivity or completeness, showing how many actual positive cases were
identified correctly.
![]()
![]()
·
F1-score
F-score, which is also referred to as F-Measure is a test’s accuracy
measure. It is calculated, based on precision and reminders, by the formula
![]()
![]()
RESULTS AND DISCUSSION
This section discusses the proposed methodological results, as outlined
below. The data is processed and classified using the proposed machine learning
classifiers, and the results from both are compared.
|
Table 1 |
|
Table 1 Shows the
Classification Performance of Four Machine Learning |
|||||||
|
Signal Processing |
Model |
Accuracy |
Precision |
Recall |
F1-Score |
||
|
RF |
99.9% |
100% |
100% |
100% |
|||
|
EMG SIGNAL |
SVM |
97.4% |
98% |
97% |
97% |
||
|
BPF |
KNN |
99.1% |
99% |
99% |
99% |
||
|
GBM |
99.7% |
100% |
100% |
100% |
|||
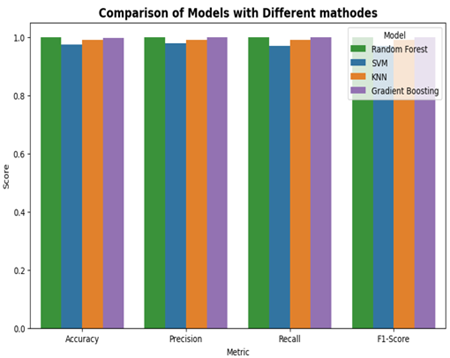
Table 1. Figure 8 shows the
classification performance of four machine learning algorithm models applied in
the electromyography (EMG) recognition task. The RF and GBM algorithms achieved
the highest overall accuracy, at 99.97% and 99.79%, respectively. Both models
also achieved perfect values in precision, recall, and F1-score
metrics. This demonstrates their high ability to distinguish between different
categories of muscle movements with minimal errors in classification.
The K-Nearest Neighbors (KNN) model also showed outstanding performance,
achieving 99.11% accuracy with balanced values for both accuracy
and recall (0.99%), indicating its high efficiency in classifying EMG signal
patterns.
In contrast, the SVM algorithm achieved a relatively lower accuracy of
97.49%, but still maintained high performance. This reflects its effectiveness
in dealing with linearly separable data, but its relatively limited ability to
represent complex nonlinear relationships compared to ensemble algorithms
(Ensemble Methods).
Overall, these results demonstrate that cluster learning models (RF and
GBM) outperform traditional algorithms in EMG signal classification tasks, due
to their ability to integrate multiple decision trees and effectively reduce
variance and overfitting. These results confirm the suitability of these models
for bio signal analysis and gesture recognition applications requiring high
accuracy and reliability.
|
Figure 8
|
|
Figure 8 Comparison
Between Four Models of Machine Learning Algorithms |
CONCLUSION
In this study, electromyography (EMG) signals were processed and analyzed
to recognize hand gestures with high reliability. An FIR band-pass filter was
applied to remove motion artifacts, baseline drift, and electrical noise,
resulting in cleaner and more representative EMG features. Several machine
learning classifiers were evaluated, including RF, SVM, KNN, and Gradient
Boosting.The results showed excellent performance across all models, with
Random Forest achieving the highest accuracy of 99.9%, followed by
Gradient Boosting (99.7%), KNN (99.1%), and SVM (97.4%).
These findings confirm that EMG signals, when properly filtered and processed,
can be used effectively for gesture recognition tasks. Additionally, the strong
performance of ensemble models highlights their suitability for
ACKNOWLEDGMENTS
None.
REFERENCES
Aarotale, P. N., and Rattani, A. (2024). Machine learning-based SEMG signal classification for hand gesture recognition. in 2024 IEEE International Conference on Bioinformatics and Biomedicine (BIBM) (6319–6326). IEEE. https://doi.org/10.1109/BIBM62325.2024.10822133
Abdulla, A., Baryannis, G., and Badi, I. (2023). An Integrated Machine Learning and MARCOS Methods for Supplier Evaluation and Selection. Decision Analytics Journal, 9, 100342. https://doi.org/10.1016/j.dajour.2023.100342
Ahmed, A. S., Obeas, Z. K., Alhade, B. A., and Jaleel, R. A. (2022). Improving Prediction of Plant Disease Using k-Efficient Clustering and Classification Algorithms. IAES International Journal of Artificial Intelligence, 11 (3), 939–948. https://doi.org/10.11591/ijai.v11.i3.pp939-948
Akar, Ö., and Güngör, O. (2012). Classification of Multispectral Images Using Random Forest Algorithm. Journal of Geodesy and Geoinformation, 1 (2), 105–112. https://doi.org/10.9733/jgg.241212.1
Al Sayaydeha, O. N., and Mohammad, M. F. (2019). Diagnosis of Parkinson Disease Using Enhanced Fuzzy Min-Max Neural Network and OneR Attribute Evaluation Method. In 2019 International Conference on Advanced Science and Engineering (ICOASE) (64–69). IEEE. https://doi.org/10.1109/ICOASE.2019.8723870
Ali, A. J. M., Hasan, T. M., and Mohammed, S. D. (2022). Digital Modulation Classification Based on Chicken Swarm Optimization and Random Forest. Journal of Engineering Science and Technology, 17, 2095–2103.
Biau, G., and Scornet, E. (2016). A Random Forest Guided Tour. TEST, 25(2), 197–227. https://doi.org/10.1007/s11749-016-0481-7
Chung, E. A., and Benalcázar, M. E. (2019). Real-Time Hand Gesture Recognition Model Using Deep Learning Techniques and EMG Signals. in 2019 27th European Signal Processing Conference (EUSIPCO) (1–5). IEEE. https://doi.org/10.23919/EUSIPCO.2019.8903136
Dev, V. A., and Eden, M. R. (2019). Formation lithology Classification Using Scalable Gradient Boosted Decision Trees. Computers and Chemical Engineering, 128, 392–404. https://doi.org/10.1016/j.compchemeng.2019.06.001
Kumari, M., and Ali, I. (2015). An Efficient Algorithm For Gender Detection Using Voice Samples. In 2015 Communication, Control and Intelligent Systems (CCIS) (221–226). IEEE. https://doi.org/10.1109/CCIntelS.2015.7437912
López, L. I. B., Ferri, F. M., Zea, J., Caraguay, Á. L. V., and Benalcázar, M. E. (2024). CNN-LSTM and post-processing for EMG-based hand gesture recognition. Intelligent Systems with Applications, 22, 200352. https://doi.org/10.1016/j.iswa.2024.200352
Najjar, E., Alkhaykanee, N. A., and Breesam, A. M. (2025). Classification of Arabic Documents with Five Classifier Models Using Machine Learning. JOIV: International Journal on Informatics Visualization, 9(1), 365–370. https://doi.org/10.62527/joiv.9.1.2539
Natekin, A., and Knoll, A. (2013). Gradient Boosting Machines, a Tutorial. Frontiers in Neurorobotics, 7, 21. https://doi.org/10.3389/fnbot.2013.00021
Obeas, Z. K., Najjar, E., Obaid, A. J., and Rasappan, S. (2024). Estimate Human Emotion Using Machine Learning Based on Voice Signals. In International Conference on Emerging Trends in AI and Computational Technologies (pp. 398–410). Springer. https://doi.org/10.1007/978-3-031-89960-7_30
Qi, J., Jiang, G., Li, G., Sun, Y., and Tao, B. (2020). Surface EMG Hand Gesture Recognition System Based on PCA and GRNN. Neural Computing and Applications, 32(10), 6343–6351. https://doi.org/10.1007/s00521-019-04142-8
Shi, W.-T., Lyu, Z.-J., Tang, S.-T., Chia, T.-L., and Yang, C.-Y. (2018). A Bionic Hand Controlled by Hand Gesture Recognition Based on surface EMG signals: A preliminary study. Biocybernetics and Biomedical Engineering, 38(1), 126–135. https://doi.org/10.1016/j.bbe.2017.11.001
Toro-Ossaba, A., Jaramillo-Tigreros, J., Tejada, J. C., Peña, A., López-González, A., and Castanho, R. A. (2022). LSTM Recurrent Neural Network for Hand Gesture Recognition Using EMG signals. Applied Sciences, 12(19), 9700. https://doi.org/10.3390/app12199700
Vujović, Ž. (2021). Classification Model Evaluation Metrics. International Journal of Advanced Computer Science and Applications, 12(6), 599–606. https://doi.org/10.14569/IJACSA.2021.0120670
Zhang, X., Chen, X., Li, Y., Lantz, V., Wang, K., and Yang, J. (2011). A framework for Hand Gesture Recognition Based on Accelerometer and EMG sensors. IEEE Transactions on Systems, Man, and Cybernetics, Part A: Systems and Humans, 41(6), 1064–1076. https://doi.org/10.1109/TSMCA.2011.2116004
|
|
 This work is licensed under a: Creative Commons Attribution 4.0 International License
This work is licensed under a: Creative Commons Attribution 4.0 International License
© DigiSecForensics 2026. All Rights Reserved.